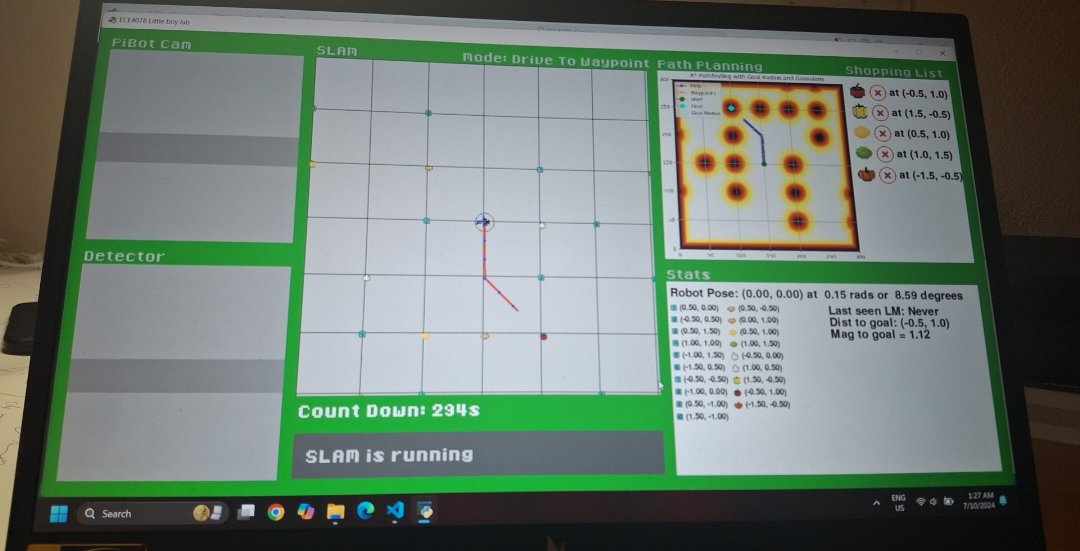
SLAM Mapping
Implemented SLAM to enable simultaneous mapping and localisation, allowing the robot to construct and navigate a representation of the environment.
Robotics Project
An autonomous mobile robot developed on the PenguinPi platform capable of mapping an environment, avoiding ArUco markers, and retrieving fruit objects from a predefined shopping list using computer vision and path planning.

The objective of this project was to develop an autonomous mobile robot capable of navigating a structured environment, avoiding ArUco markers, and retrieving fruit items from a predefined shopping list. The project was built using the PenguinPi robotics platform.
The base PenguinPi system initially supported only low-level motion commands such as forward, left, and right movement. All higher-level autonomous behaviour, including perception, mapping, and navigation, was developed by our team.
SLAM was implemented to enable simultaneous localisation and mapping, allowing the robot to construct and navigate a representation of its environment. Classical computer vision techniques were used for ArUco marker detection and pose estimation, while a machine learning classifier was developed to identify and differentiate fruit objects within the environment.
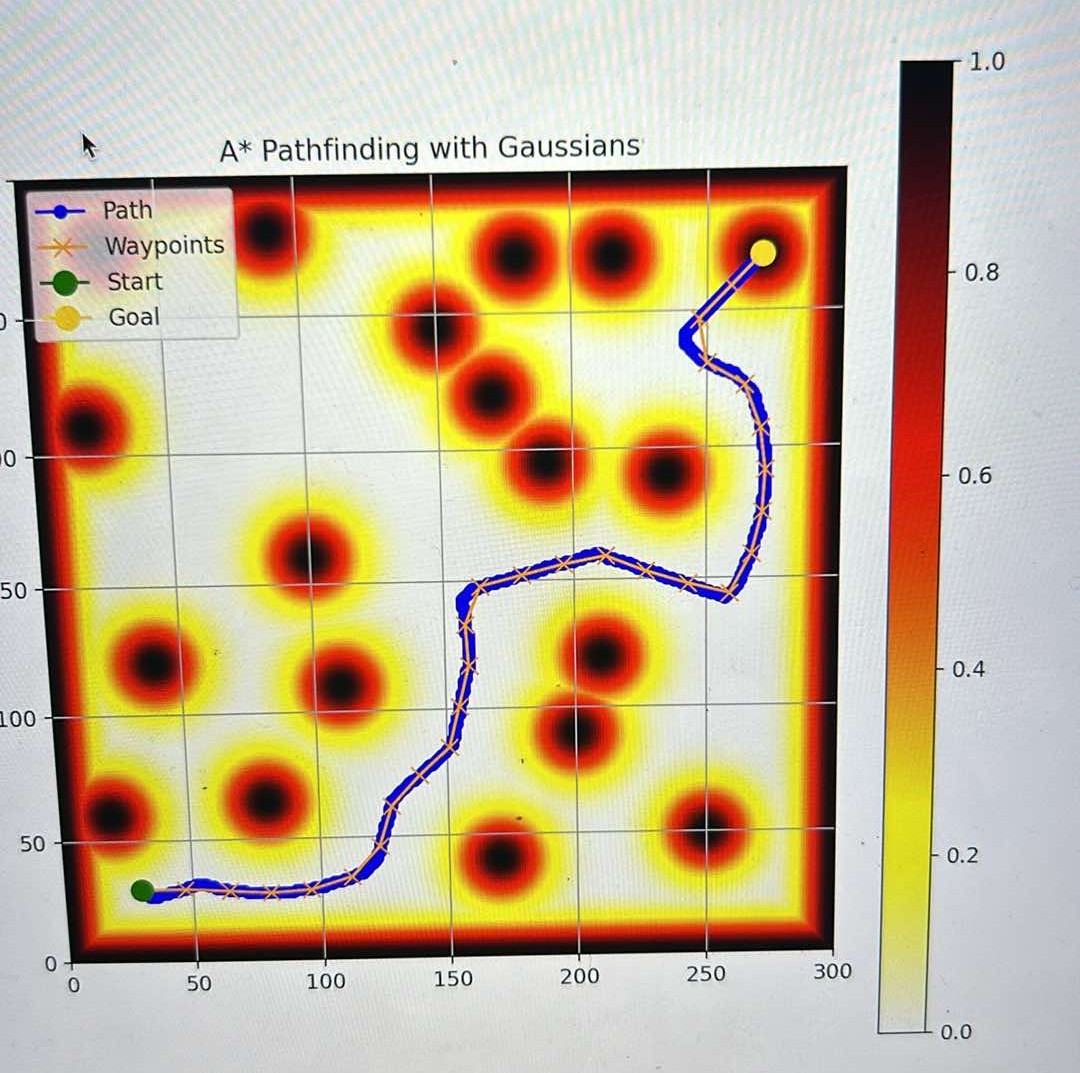
I contributed to modelling the robot’s kinematics to support control integration and implemented A* path planning for global obstacle-aware navigation. The system was validated through both simulation and real-world testing using ROS2 and Gazebo, successfully demonstrating autonomous navigation, mapping, and targeted object retrieval.

Implemented SLAM to enable simultaneous mapping and localisation, allowing the robot to construct and navigate a representation of the environment.
Classical computer vision techniques were used to detect ArUco markers for localisation and environmental perception.
A machine learning classifier was developed to identify and distinguish fruit objects required by the robot’s shopping list task.
Implemented A* path planning to compute global navigation routes while avoiding obstacles and ArUco markers within the mapped environment.